The Spacetime Geometry of Diffusion Models
A summary of our ICLR 2026 Oral paper on defining a geometric structure on the latent space of diffusion models using information geometry.
Introduction
Latent generative models, VAEs, GANs, diffusion models, all share a common structure: a latent space and a decoder that maps latent codes to data. In VAEs and GANs, the latent space is typically lower-dimensional than the data, and it has long been understood that equipping it with the right geometry leads to more meaningful distances and more realistic interpolations
In this post, we summarize our ICLR 2026 Oral paper, where we investigate the geometry of diffusion latent spaces. We first show an interesting negative result: the standard “pullback” approach, which works well for VAEs, provably collapses in diffusion models, i.e. all shortest paths decode to straight lines. We then introduce a fix: by switching to a stochastic view and treating the (state, time) pair as a point in a latent spacetime, we recover a rich geometric structure using information geometry. The resulting shortest paths, spacetime geodesics, trace minimal sequences of noise-and-denoise edits between data points. We demonstrate two applications: a principled Diffusion Edit Distance between images, and transition path sampling in molecular systems.
Shortest Paths in Latent Spaces
Before diving into diffusion models, let’s see why geometry matters for latent spaces. Given a latent space \(\mathcal{Z}\) and a decoder \(f: \mathcal{Z} \to \mathcal{X}\), we often want to interpolate between two latent codes \(\mathbf{z}^a\) and \(\mathbf{z}^b\). The simplest approach is linear interpolation - a straight line in \(\mathcal{Z}\). But straight lines in latent space don’t generally map to “realistic” paths in data space. They tend to pass through atypical regions of the latent space, producing unrealistic intermediate samples.
The solution is to define a notion of infinitesimal distance in \(\mathcal{Z}\) that captures the structure of the data. Given a way to measure the “cost” \(d(\mathbf{z}, \mathbf{z} + d\mathbf{z})\) of an infinitesimal step, the “shortest path” is no longer a straight line, but a geodesic - a curve that minimizes the total cost of traversal. Different choices of infinitesimal distance lead to different geodesics, and hence different notions of what it means to interpolate between two latent codes.
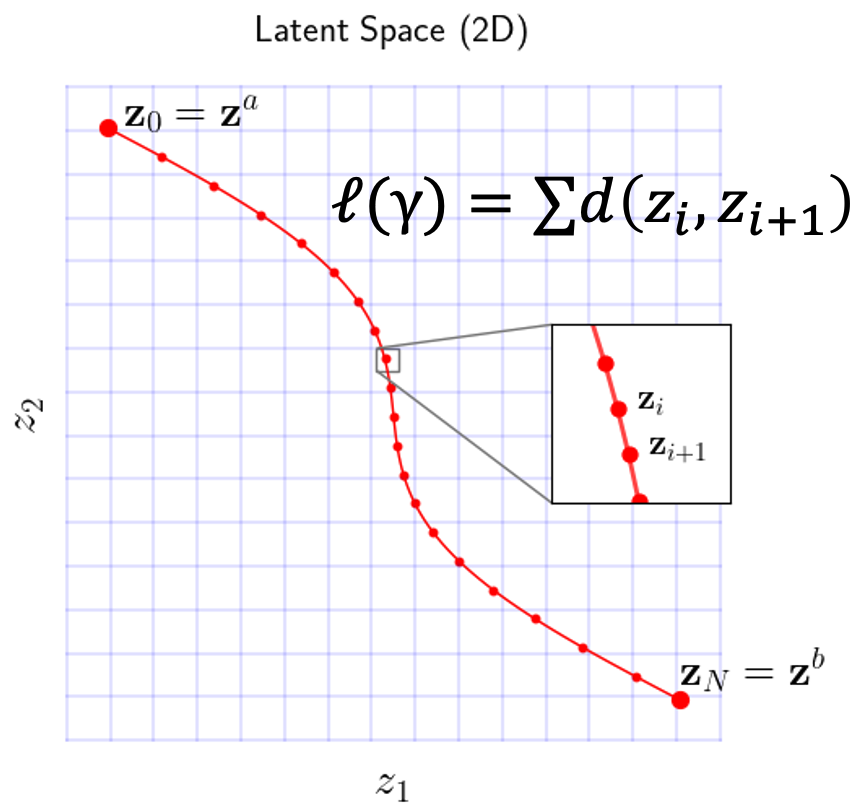
For a discretized curve \(\gamma = (\mathbf{z}_0, \ldots, \mathbf{z}_N)\), finding the geodesic amounts to minimizing the energy
\[\mathcal{E}(\gamma) \approx \frac{N}{2} \sum_{i=0}^{N-1} d^2(\mathbf{z}_i, \mathbf{z}_{i+1}),\]where \(d\) is the local infinitesimal distance. The key question is: how should we define \(d\)?
Pullback Geometry
A natural choice, well-studied in the context of VAEs
With this choice, geodesics try to keep the decoded curve as smooth as possible - they follow the “surface” of the data manifold rather than cutting through empty space. This works beautifully for VAEs, where the latent space is lower-dimensional than the data space, producing more realistic interpolations than linear baselines.
Diffusion Models Recap
Recall that diffusion models
where \(\alpha_t, \sigma_t\) control how quickly information is destroyed. At the final time \(T\), we reach approximately pure noise: \(p_T \approx \mathcal{N}(0, \sigma_T^2 I)\).
To generate data, we reverse this process. There are two approaches
- Deterministic (PF-ODE): \(d\mathbf{x} = \left(f_t \mathbf{x} - \tfrac{1}{2}g_t^2 \nabla \log p_t(\mathbf{x})\right) dt\), which defines a bijection \(\mathbf{x}_T \mapsto \mathbf{x}_0(\mathbf{x}_T)\).
- Stochastic (Reverse SDE): \(d\mathbf{x} = \left(f_t \mathbf{x} - g_t^2 \nabla \log p_t(\mathbf{x})\right) dt + g_t d\overline{W}_t\), which defines a denoising posterior distribution \(p(\mathbf{x}_0 \mid \mathbf{x}_t)\) for each noisy input - the distribution over clean data consistent with the noisy observation.
Both require the score function \(\nabla \log p_t(\mathbf{x})\), which is approximated by a neural network. The deterministic decoder gives us a single clean image for each noise vector; the stochastic decoder gives an entire denoising posterior over possible clean images.
Pullback Geometry Fails for Diffusion Models
Armed with the pullback metric and a deterministic PF-ODE decoder \(\mathbf{x}_T \mapsto \mathbf{x}_0(\mathbf{x}_T)\), one might hope to get nice curved geodesics between images, as in VAEs. Unfortunately, this does not work.
Theorem. Pullback geodesics in diffusion models decode to straight lines in data space.
Why? The pullback energy of a latent curve \(\gamma\) only depends on the decoded curve (see the proof in
The minimizer is always the constant-speed straight line \(\mathbf{x}_s = (1-s)\mathbf{x}^a + s\mathbf{x}^b\) in data space. Since the PF-ODE is a bijection, this line has a unique latent preimage, which is therefore the pullback geodesic. The result: pullback geodesics may curve in noise space, but they always decode to straight lines in data space, completely ignoring the structure of the data manifold.
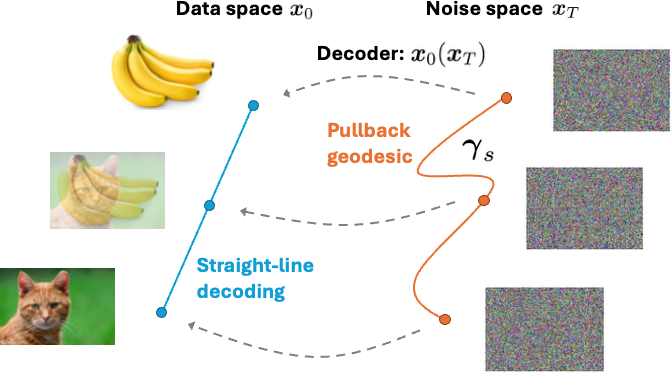
The pullback geodesic may curve in the latent (noise) space, but its decoding is always a straight line in data space.
The root cause is that, unlike VAEs, diffusion models have latent and data spaces of equal dimension. The decoder operates directly in the ambient space, and without a dimensionality bottleneck, it cannot capture intrinsic data structure through pullback alone.
Take-home: The standard pullback metric is fundamentally unsuitable for diffusion models. We need a different approach.
The Spacetime Alternative
What is the Latent Space of a Diffusion Model?
In diffusion models, there are many possible choices for the “latent” representation: we could use \(\mathbf{x}_t\) at any noise level \(t\). But fixing a single \(t\) is arbitrary, and at \(t = T\) the representation is essentially meaningless, i.e. the forward process is memoryless, so the posterior \(p(\mathbf{x}_0 \mid \mathbf{x}_T) \approx q(\mathbf{x}_0)\), is independent of \(\mathbf{x}_T\).
Instead, we propose to consider all noise levels simultaneously. A point in our latent space is a spacetime coordinate
\[\mathbf{z} = (\mathbf{x}_t, t) \in \mathbb{R}^D \times (0, T],\]pairing a noisy sample with its noise level. For \(D\)-dimensional data, this yields a \((D+1)\)-dimensional spacetime. Clean data \(\mathbf{x}\) lives at \((\mathbf{x}, 0)\) - the boundary of the spacetime.
What is the Decoder?
In the spacetime view, each latent point \(\mathbf{z} = (\mathbf{x}_t, t)\) indexes a denoising posterior distribution \(p(\mathbf{x}_0 \mid \mathbf{x}_t)\), which is the distribution over clean data that could have produced the noisy observation \(\mathbf{x}_t\) at noise level \(t\). The “decoder” is no longer a single point, but an entire probability distribution. This is key: instead of comparing decoded points, we compare decoded distributions.
Information Geometry
The goal is the same as with the pullback: we want to measure how much the “decoding” changes when we take an infinitesimal step in the latent space. The difference is that the decoder now outputs a distribution rather than a point, so we need to replace the Euclidean distance with a measure of discrepancy between distributions. The natural choice from information geometry
This is the Fisher-Rao metric.
| Deterministic Decoder | Stochastic Decoder | |
|---|---|---|
| Decoder output | A point \(f(\mathbf{z})\) | A distribution \(p(\mathbf{x}_0 \mid \mathbf{z})\) |
| Infinitesimal discrepancy | \(||f(\mathbf{z}) - f(\mathbf{z}+d\mathbf{z})||^2\) | \(\text{KL}[p(\cdot \mid \mathbf{z}) || p(\cdot \mid \mathbf{z}+d\mathbf{z})]\) |
| Metric name | Pullback | Fisher-Rao |
A geodesic under the Fisher-Rao metric is the path that minimizes the total change in denoising posterior.
Computing Geodesics in Practice
Usually, computing geodesics under the Fisher-Rao metric is only tractable for simple parametric families (e.g., Gaussians). The denoising distributions in diffusion models are complex, high-dimensional, and non-Gaussian. So how can we make this work?
The key insight is that the denoising distributions form an exponential family. Despite being complicated, \(p(\mathbf{x}_0 \mid \mathbf{x}_t)\) can always be written as
with natural parameter \(\boldsymbol{\eta}(\mathbf{x}_t, t) = \left(\frac{\alpha_t}{\sigma_t^2}\mathbf{x}_t, -\frac{\alpha_t^2}{2\sigma_t^2}\right)\) and sufficient statistic \(T(\mathbf{x}_0) = (\mathbf{x}_0, \|\mathbf{x}_0\|^2)\). This is the same exponential structure as a Gaussian, but with the data distribution \(q\) as the base measure instead of a flat Lebesgue measure.
Why does this matter? Because for exponential families, the curve energy simplifies dramatically. The energy of a discretized curve \(\gamma = (\mathbf{z}_0, \ldots, \mathbf{z}_{N-1})\) is
\[\mathcal{E}(\gamma) \approx \frac{N-1}{2} \sum_{n=0}^{N-2} \left(\boldsymbol{\eta}(\mathbf{z}_{n+1}) - \boldsymbol{\eta}(\mathbf{z}_n)\right)^\top \left(\boldsymbol{\mu}(\mathbf{z}_{n+1}) - \boldsymbol{\mu}(\mathbf{z}_n)\right),\]where \(\boldsymbol{\mu}(\mathbf{z}) = \mathbb{E}[T(\mathbf{x}_0) \mid \mathbf{z}] = \left(\mathbb{E}[\mathbf{x}_0 \mid \mathbf{z}], \, \mathbb{E}[\|\mathbf{x}_0\|^2 \mid \mathbf{z}]\right)\) is the expectation parameter. The natural parameter \(\boldsymbol{\eta}\) is known in closed form, and the expectation parameter \(\boldsymbol{\mu}\) can be estimated from the denoiser network \(\hat{\mathbf{x}}_0(\mathbf{x}_t)\) using Tweedie’s formula
This means spacetime geodesics are simulation-free: we never need to run the reverse SDE. For a curve discretized into \(N\) points, we only need \(N\) forward passes through the denoiser. In practice, we parameterize \(\gamma\) as a cubic spline with fixed endpoints and minimize \(\mathcal{E}(\gamma)\) via gradient descent.
Take-home: Denoising distributions form an exponential family, which makes the Fisher-Rao energy tractable. Geodesics can be computed efficiently without simulating the SDE.
Application: Diffusion Edit Distance
The spacetime geometry induces a principled distance between data points. We identify a clean datum \(\mathbf{x}\) with the spacetime point \((\mathbf{x}, 0)\), whose corresponding denoising posterior is the Dirac delta \(\delta_{\mathbf{x}}\). Given two data points \(\mathbf{x}^a\) and \(\mathbf{x}^b\), the Diffusion Edit Distance (DiffED) is defined as
\[\text{DiffED}(\mathbf{x}^a, \mathbf{x}^b) = \ell(\gamma),\]where \(\gamma\) is the spacetime geodesic connecting \((\mathbf{x}^a, 0)\) and \((\mathbf{x}^b, 0)\).
The interpretation is intuitive: a spacetime geodesic links two clean data points through intermediate noisy states. It traces the minimal sequence of edits: add just enough noise to forget information specific to \(\mathbf{x}^a\), then denoise to introduce information specific to \(\mathbf{x}^b\). The path length quantifies the total “edit cost”, measured by how much the denoising distribution changes along the way. As endpoint similarity decreases, the geodesic passes through noisier intermediate states - the model needs to “forget” more before it can “reconstruct” the target.
We evaluated DiffED on ImageNet images using the pretrained EDM2 model
Take-home: DiffED measures the minimal “noise-and-denoise” editing cost between two data points.
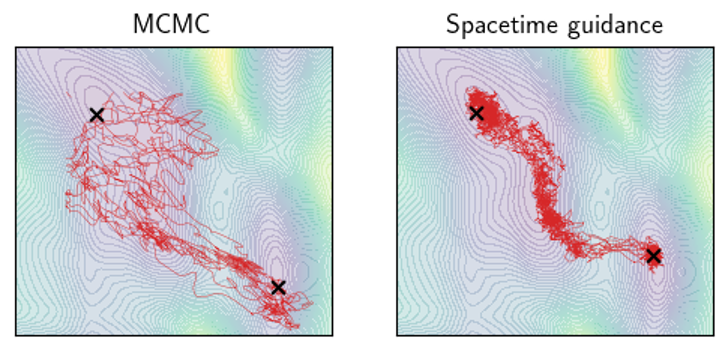
Application: Transition Path Sampling
Beyond images, the spacetime framework has a natural application in molecular systems: transition path sampling. Given a Boltzmann distribution \(q(\mathbf{x}) \propto \exp(-U(\mathbf{x}))\), the goal is to find plausible transition paths between two low-energy states (e.g., two stable configurations of a molecule), navigating around the high-energy barriers that separate them.
Here’s the key connection. When the data distribution is Boltzmann, the denoising posterior is also Boltzmann:
\[p(\mathbf{x}_0 \mid \mathbf{x}_t) \propto \exp\left(-U(\mathbf{x}_0 \mid \mathbf{x}_t)\right), \qquad U(\mathbf{x}_0 \mid \mathbf{x}_t) = U(\mathbf{x}_0) + \tfrac{1}{2}\text{SNR}(t)\|\mathbf{x}_0 - \mathbf{x}_t/\alpha_t\|^2,\]where \(\text{SNR}(t) = \alpha_t^2 / \sigma_t^2\). This conditional energy combines the true potential with an additional bias toward \(\mathbf{x}_t / \alpha_t\) - at low noise (high SNR), the distribution is concentrated near the latent; at high noise (low SNR), it approaches the unconditional Boltzmann.
Our method proceeds in two steps:
- Compute a spacetime geodesic between the two low-energy states \(\mathbf{x}^1_0\) and \(\mathbf{x}^2_0\). This provides an optimal interpolation of denoising posteriors from \(\delta_{\mathbf{x}^1_0}\) to \(\delta_{\mathbf{x}^2_0}\).
- Sample transition paths by running annealed Langevin dynamics along the geodesic. Starting from \(\mathbf{x} = \mathbf{x}^1_0\), we iterate over the spacetime curve points \(\gamma_n\), taking a few Langevin steps targeting \(p(\mathbf{x} \mid \gamma_n)\) at each point. Since consecutive distributions along the geodesic change smoothly (that is what geodesics are optimized for!), the current sample is always a good initialization for the next Langevin chain.
We tested this on Alanine Dipeptide, a standard benchmark in the transition path sampling literature
| Method | MaxEnergy (↓) | # Evaluations (↓) |
|---|---|---|
| Lower Bound | 36.42 | N/A |
| MCMC-fixed-length | 42.54 ± 7.42 | 1.29B |
| MCMC-variable-length | 58.11 ± 18.51 | 21.02M |
| Doob’s Lagrangian | 66.24 ± 1.01 | 38.4M |
| Spacetime geodesic (Ours) | 37.36 ± 0.60 | 16M (+16M) |
Constrained Transitions
A powerful feature of our framework is the ability to incorporate constraints on the transition paths. By adding a penalty term to the energy minimization
\[\min_\gamma \left[ \mathcal{E}(\gamma) + \lambda \int_0^1 h(\gamma_s) \, ds \right],\]we can enforce additional properties:
- Low-variance transitions: Penalizing low SNR along the path forces the geodesic to stay at higher SNR, which concentrates the denoising posterior and yields more repeatable trajectories.
- Region avoidance: By encoding a “forbidden zone” as a denoising distribution \(p(\cdot \mid \mathbf{z}^*)\) and penalizing proximity to it (via KL divergence), we can steer transition paths away from undesirable regions of the data space.
Both variants are demonstrated in
Take-home: Spacetime geodesics provide a principled guide for transition path sampling, and the framework naturally extends to constrained variants.
Conclusion
We presented a geometric perspective on the latent space of diffusion models. The standard pullback approach provably collapses, always producing straight-line interpolations in data space. By switching to a stochastic view and introducing the latent spacetime \((\mathbf{x}_t, t)\) equipped with the Fisher-Rao metric, we recover a rich and tractable geometric structure. The key theoretical insight, that denoising distributions form an exponential family, makes geodesic computation practical even for high-dimensional image models.
The resulting framework yields two concrete applications: a Diffusion Edit Distance that measures the minimal noise-and-denoise editing cost between data points, and a transition path sampling method that outperforms specialized baselines in molecular simulations. We believe this geometric perspective opens up further directions, including improved sampling strategies and extensions to discrete or Riemannian diffusion models.